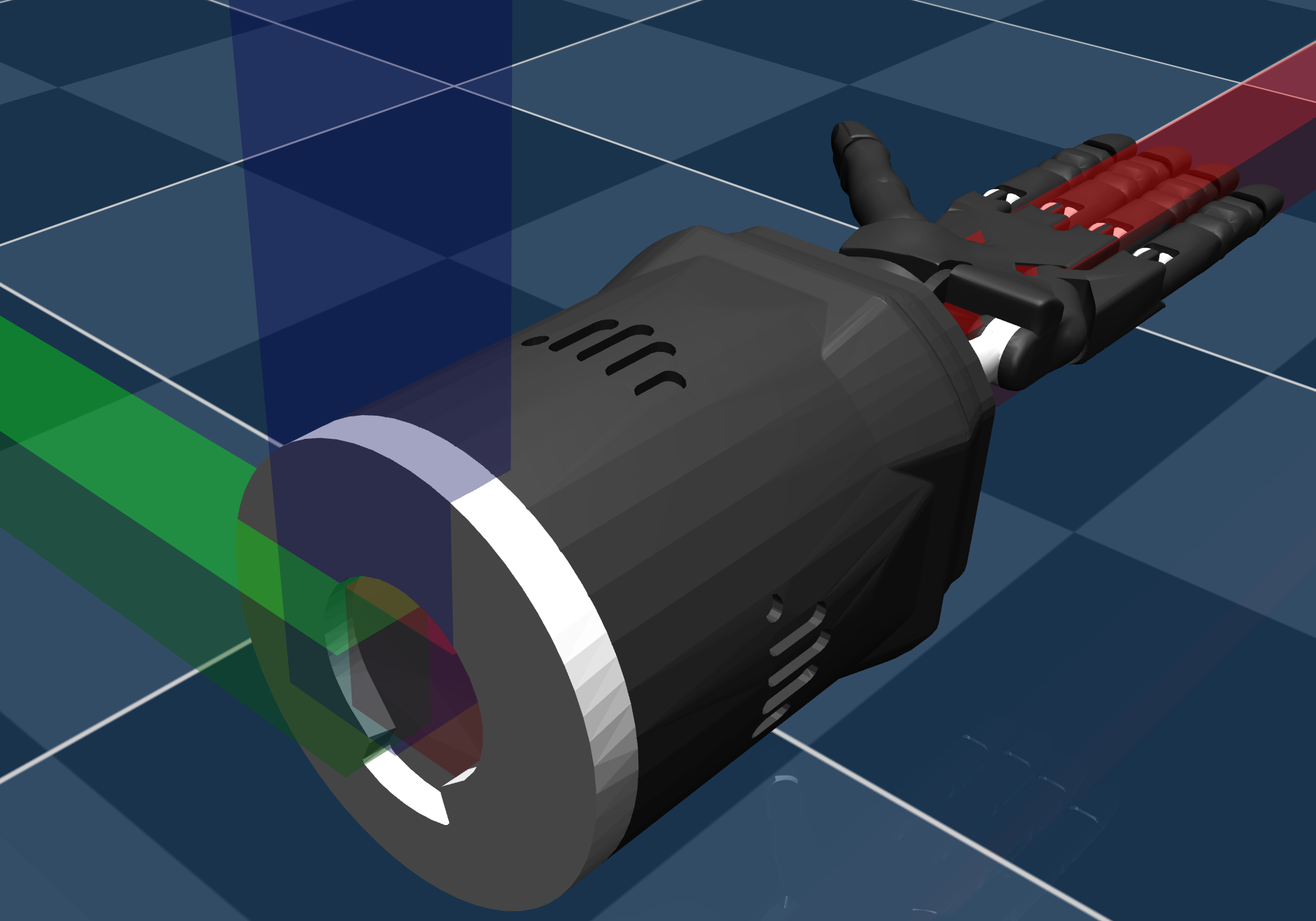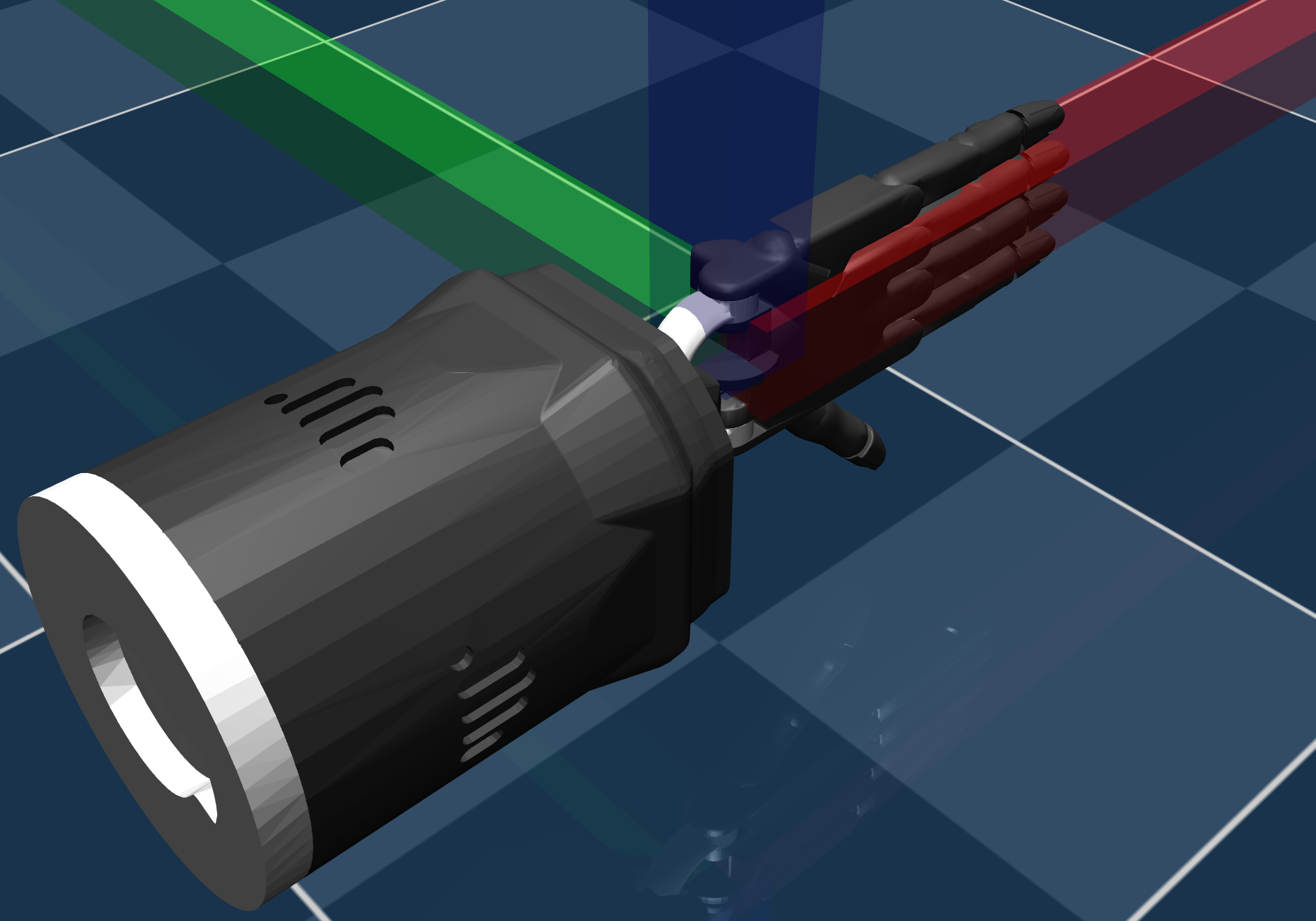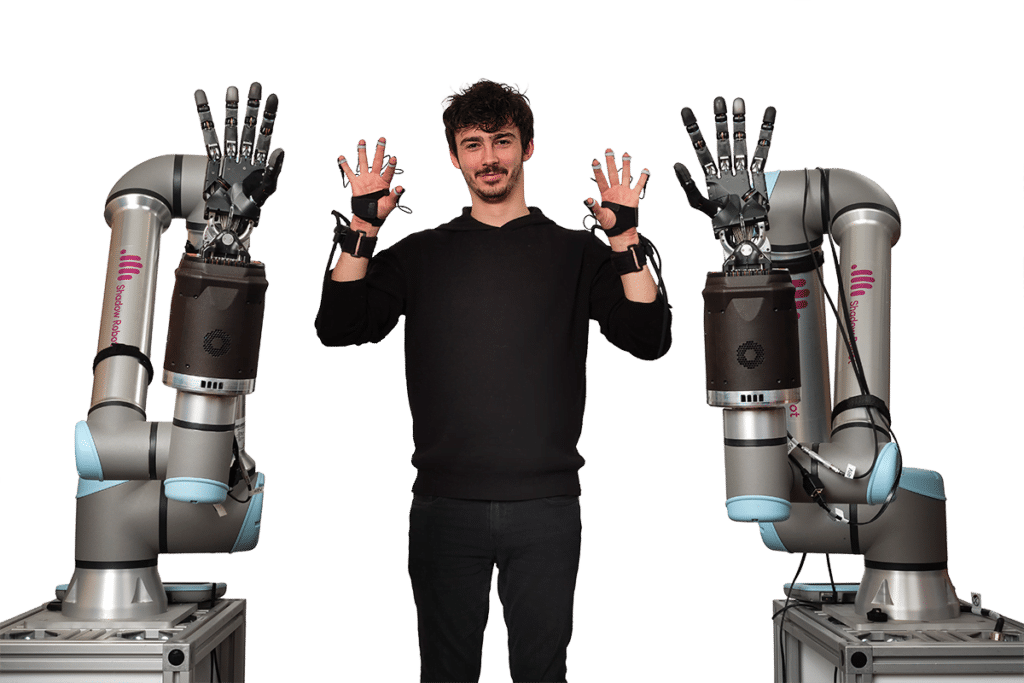
Simulating $200K teleoperation setup for $2K
Dima Yanovsky, Mauricio Pereira
Prox, MIT
yanovsky@mit.edu, maurici0@mit.edu
Real-time teleoperation of dual Shadow Hands setup ($200K hardware value) running in our DART teleoperation platform on Apple Vision Pro